简要介绍大数据常用的数据结构
BitMap
位图
将具体数据映射到比特数组中,0表示数据不存在,1表示数据存在。适用于大量数据查询和去重的场景,具有比较高的空间利用率。但是具有以下缺点
数据碰撞。具体数据映射到比特数组中会有碰撞的问题,可以考虑用 Bloom Filter 来解决,Bloom Filter 使用多个 Hash 函数来减少冲突的概率
数据稀疏。稀疏数据的存储会有很大的空间浪费,通过引入 Roaring BitMap 来解决
Roaring Bitmap
将具体数据映射到32位无符号整数按照高16位分桶,低16位放入container中。Roaring Bitmap是对BitMap的改进,通过三种不同的container解决了稀疏数据存储的问题。
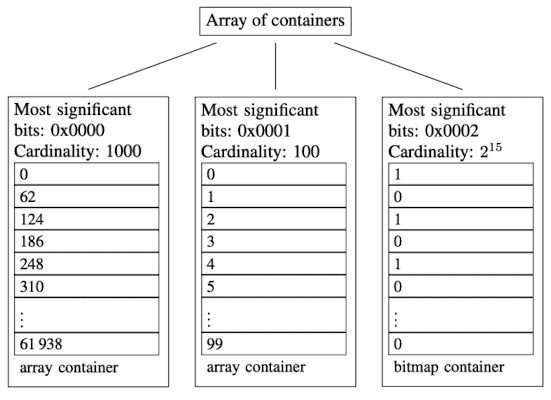
图中示出了三个container
- 高16位为0000H的ArrayContainer,存储有前1000个62的倍数
- 高16位为0001H的ArrayContainer,存储有$[2^{16},2^{16}+100)$区间内的100个数
- 高16位为0002H的RunContainer,存储有$[2\times2^{16},3\times2^{16})$区间内的所有偶数,共$2^{15}$
ArrayContainer
当桶内数据的基数不大于4096时,会采用它来存储,其本质上是一个无符号短整型的 有序数组。数组初始长度为4,随着数据的增多会自动扩容至最大长度4096
BitMapContainer
当桶内数据的基数大于4096时,会采用它来存储,其本质就是长度为1024的无符号长整型数组表示的BitMap。
复杂度分析
在创建一个新container时,如果只插入一个元素,默认会用ArrayContainer来存储。当ArrayContainer的容量超过4096后,会自动转成 BitMapContainer存储。低于4096时Arraycontainer比较省空间,高于4096时BitMapContainer比t较省空间。即ArrayContainer存储稀疏数据,Bitmapcontainer适合存储稠密数据,可以最大限度地避免内存浪费。
增删改查的时间复杂度方面,BitMapContainer只涉及到位运算,复杂度为O(1)。而ArrayContainer需要用二分查找在有序数组中定位元素故为O(logN)。空间占用方面,BitMapcontainer恒定为8192B,而ArrayContainers的空间占用与序列基数有关 。
Hyperloglog
基于$n$重伯努利实验原理的不精准去重统计。假设一直抛硬币,直到它出现正面为止,记为一次伯努利实验。对于$n$重伯努利实验,每此伯努利实验的抛掷次数为$k_1,k_2,\cdots,k_n$,最大抛掷次数为$k_{max}$。由极大似然估计可知,$n=2^{k_{max}}$。假设一共有$m$轮$n$重伯努利实验,随着$m$的增加,使用最大抛掷次数的调和平均数,会使极大似然估计值与越来越接近真实值。
对于具体数据通过哈希函数映射成比特串,根据比特串的高几位进行分桶,每个桶相当于一轮$n$重伯努利实验。从右往左看,比特串首次出现1的位置即为当前伯努利实验的抛掷次数$k$,每次插入数据都将更新对应桶中的$k_{max}$。根据极大似然估计和调和平均值,即可最终计算出所有轮的总实验次数$m\times n$,可用以下公式计算,其中$const$为修正常数随着$m$而变化
\[DV_{HLL}=const\times m\times \frac{m}{\sum^m_{j=1}\frac{1}{2^{R_j}}}\]- 由于哈希函数的存在,重复的数据不会进行统计
- 所有数据都被均等的分在$m$个桶中,每个桶中有$n$个元素
- 使用调和平均数替换平均数,不容易受到大数值的影响
Bloom Filter
布隆过滤器
二进制向量结构(空间利用率和时间效率),检测集合中是否存在某元素,存在误判但不存在漏判
原理
长度为m的位数组存储集合信息,使用k个独立的哈希函数将数据映射到位数组空间。
# 集合A初始化布隆过滤器
BloomFilter(set A, hash_functions, integer m)
# 位数组
filter [1...m] = 0
foreach a_i in A:
foreach h_j in hash_functions:
filter[h_j(a_i)] = 1
end foreach
end foreach
return filter
元素a,若对于相同的k个哈希函数,对应位都为1,则存在于集合中
MembershipTest(element, filter, hash_functions)
foreach h_j in hash_functions:
if filter[h_i(element)] != 1 then
return false
end foreach
return true
误判率
对于集合大小n, 哈希函数个数k, 位数组大小m,误判率为 $p_{fp}\approx (1-e^{-kn/m})^k$ ,最优的哈希函数个数为 $k=\frac{m}{n} ln2$ ,故已知集合大小 $n$ 的情况下,并且在期望的误判率 $P$ 下,位数组的大小为 $m=-\frac{nlnp}{(ln2)^2}$
改进
计数BF,位数组的一个比特位拓展为多个比特位,就可以增加删除集合成员的功能
SkipList
可替代平衡树的数据结构,依靠随机数保持数据的平衡分布。在最坏情况下效率要低于平衡树,在大多数情况下仍然非常搞笑。增删改查的时间复杂度都是O(logn)。

在有序链表的基础上,以随机概率给部分结点增加指针,指向更远的后方结点。如图所示,结点的层数对应着指针的个数。
查找
search(list, searchKey)
x = list.head
# 从当前层数遍历到最底层
for i in [list.level, 1]:
# 每层找到第一个大于或等于key的前一个结点
while x.next[i].key < searchKey:
x = x.next[i]
# 底层的后一个结点即是目标值
x = x.next[1]
if x.key == searchKey: return x.val
else: return failure
插入&更新
以下是随机生成层数的伪代码
randomLevel()
level = 1
# random() 生成[0, 1)的随机数
# 以p的概率依次增加层数
while random() < p and level < maxLevel:
level += 1
return level
以下是插入的伪代码
insert(list, searchKey, newValue)
update = array[maxLevel]
x = list.head
# 从当前层数遍历到最底层
for i in [list.lever, 1]:
# 每层找到第一个大于或等于key的前一个结点
while x.next[i].key < searchKey:
x = x.next[i]
update[i] = x
x = x.next[1]
# 更新
if x.key == searchKey: x.val = newValue
else:
level = randomLevel
if level > list.level:
# 新结点大于当前层数,则要添加新层head
for i in [list.level + 1, level]:
update[i] = list.head
list.level = level
# 由下往上插入结点 update[i] -> x -> update[i].next[i]
x = node(level, searchKey, newValue)
for i in [1, level]:
x.next[i] = update[i].next[i]
update[i].next[i] = x
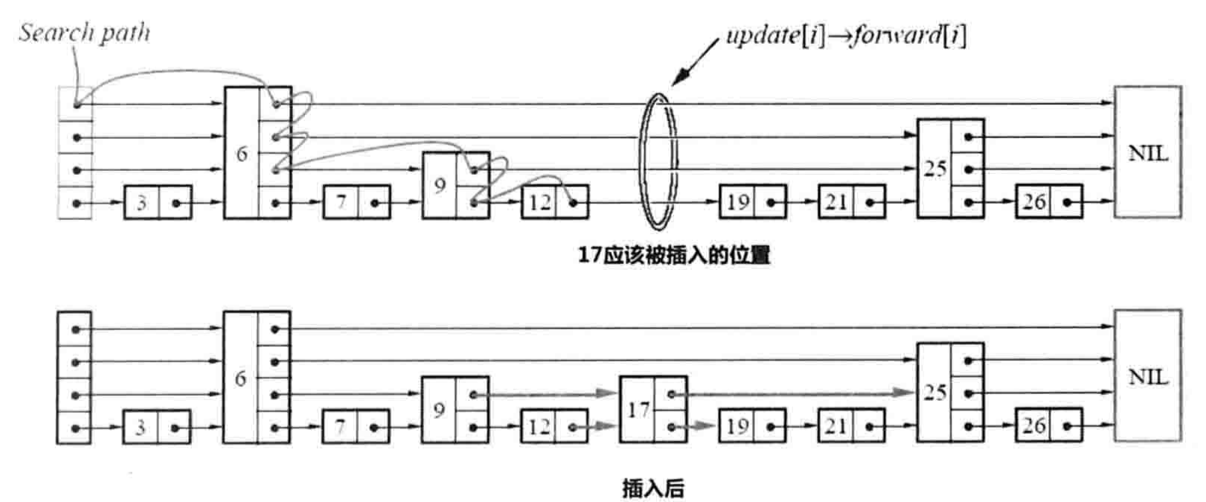
下图所示插入17的过程
删除
删除的过程与插入类似
delete(list, searchKey)
update = array[maxLevel]
x = list.head
# 从当前层数遍历到最底层
for i in [list.lever, 1]:
# 每层找到第一个大于或等于key的前一个结点
while x.next[i].key < searchKey:
x = x.next[i]
update[i] = x
# 找到要删除的结点
x = x.next[1]
if x.key == searchKey:
for i in [1, list.level]:
# 要删除的结点在当前层没有,在更高的层也不会有
if update[i].next[i] != x: break
update[i].next[i] = x.next[i]
# 更新当前的层数
while list.level > 1 and list.head.next[list.level] == null:
list.level -= 1
LSM
Log-structured Merge-tree
将大量随机写转化为批量的顺序写,提升磁盘写入速度,牺牲了读性能,读性能可以使用布隆过滤器进行优化。
以LevelDB为例
存储结构
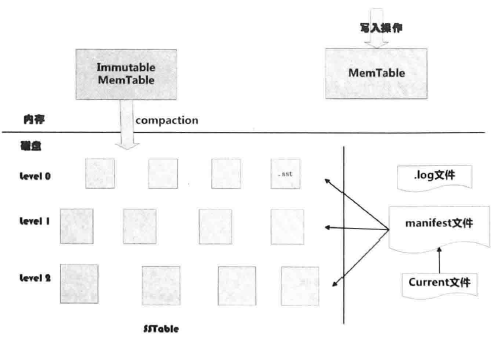
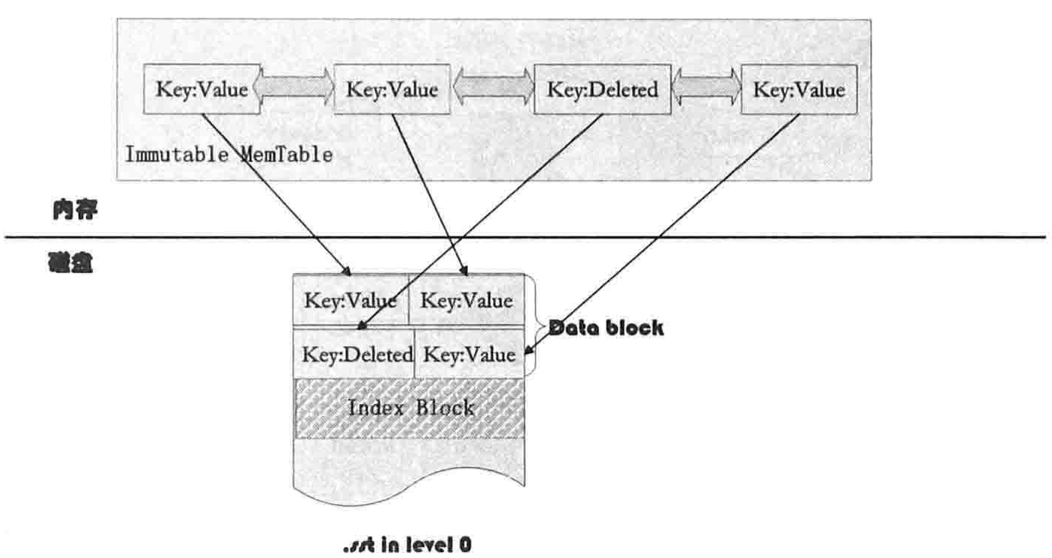
内存中的MemTable和磁盘上的各级SSTable文件就形成了LSM树
- 内存
- MemTable:跳表结构。用于数据的快速插入
- Immutable MemTable:只读的跳表结构。在MemTable占用内存达到一定阈值之后,便转化为Immutable MemTable
- 硬盘
Current:当前manifest文件名
Manifest:SSTable的元信息,各层级SSTable文件的Level,文件名,最大最小key
Log:MemTable的插入日志。用于系统崩溃,内存中的MemTable数据丢失后的数据恢复
SSTable:Immutable MemTable导出到磁盘的结果。层级key有序文件结构。第0层有minor compaction生成会出现key重叠现象,但其余层的文件里不会存在key重叠现象
compaction
minor compaction: 当MemTable达到一定大小时,转化为Immutable MemTable并按顺序写入level0的新SSTable文件中。不处理删除操作
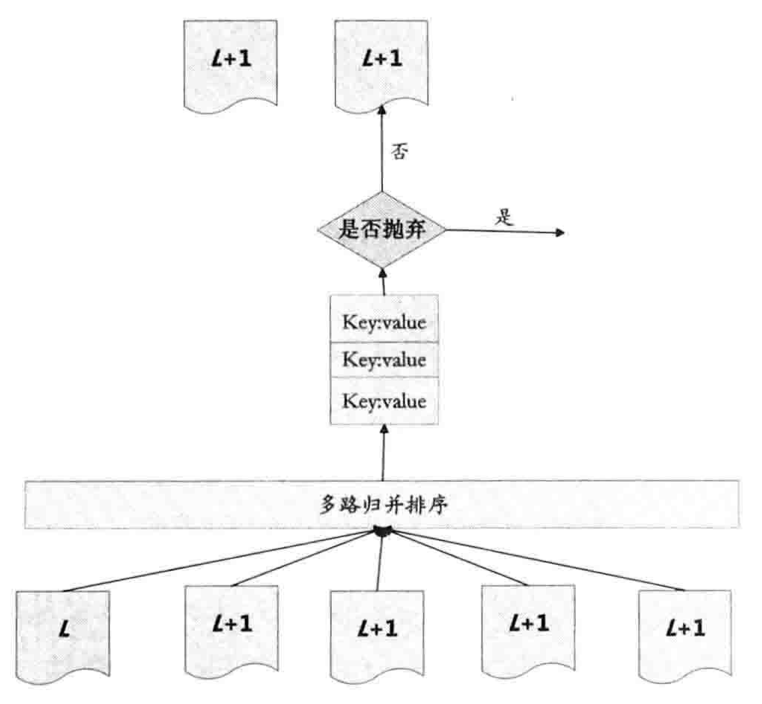
major compaction: 当某个Level下的SSTable文件数目超过一定数量时,从这个Level中选择一个文件(Level0 需要选择所有key重叠的文件)和高一Level的文件合并。
- 轮流选择Level层的文件
- Level+1层选择和Level层文件在key range上有重叠的所有文件进行合并
- 使用多路归并排序,并判断这个KV是否被删除,形成一系列新Level+1层的多个文件
- 删除Level层的那个文件和旧Level+1层的所有文件
Merkle Hash Tree
主要用于海量数据下快速定位少量变化的数据内容,在BitTorrent,Git,比特币等中得到了应用。
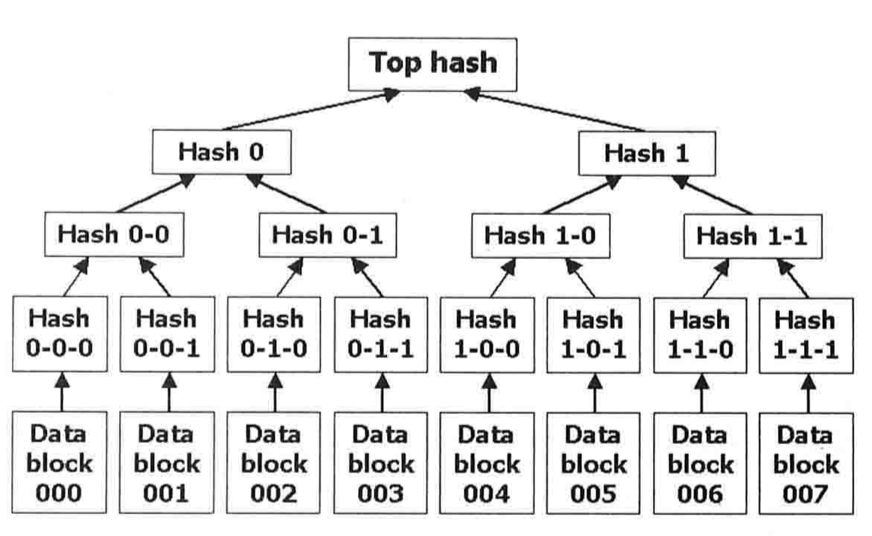
如图所示,叶子结点是每个数据项的哈希值,分支结点则保存其所有子结点的哈希值,依次由下往上推,根结点保存整棵树的哈希值。当某个数据项发生变化时,其对应的叶子结点的哈希值也会发生变化,其祖先结点也会跟着变化,这样在O(logn)时间内就能快速定位变化的数据内容。
REFERENCE
文档信息
- 本文作者:wzx
- 本文链接:https://masterwangzx.com/2020/09/05/bigData-data-structure/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)