随着训练样本数量的提升,我们训练后的模型的表现也越来越好,但每次迭代的时间也不断增加。我们主要通过,减少完成一次参数更新的样本数量,以及利用算法尽量从最短路径更新参数,来优化梯度下降算法
MBGD SGD BGD
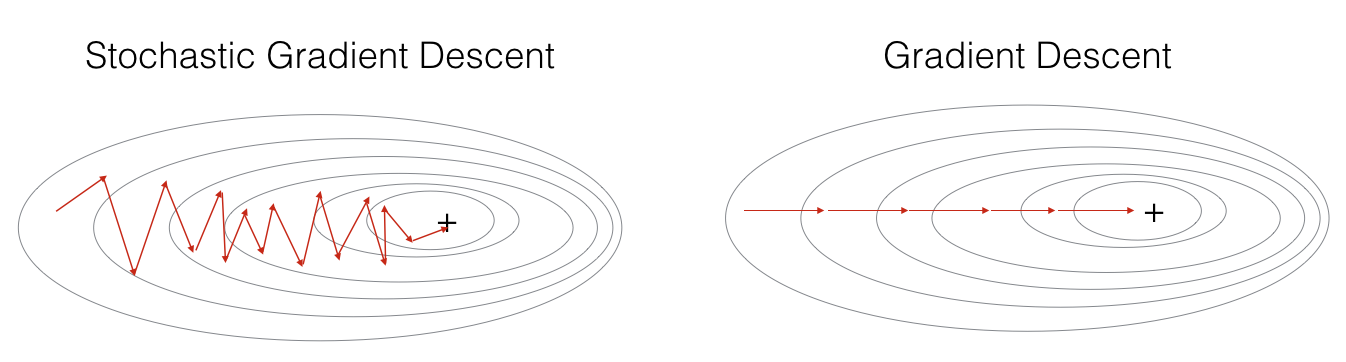
Batch Gradient Descent,即批量梯度下降法。每次迭代将所有数据用于计算梯度,并更新参数。这个做法优点与缺点显而易见。优点就是样本数量多,样本噪声小,成本函数的下降曲线会比较平滑,最终我们的模型可能会更好。缺点就是每次迭代的时间太长,会受内存限制,同时也不能在训练过程中增加训练样本。但在数据量比较小的情况下,我觉得批量梯度下降法表现得很好
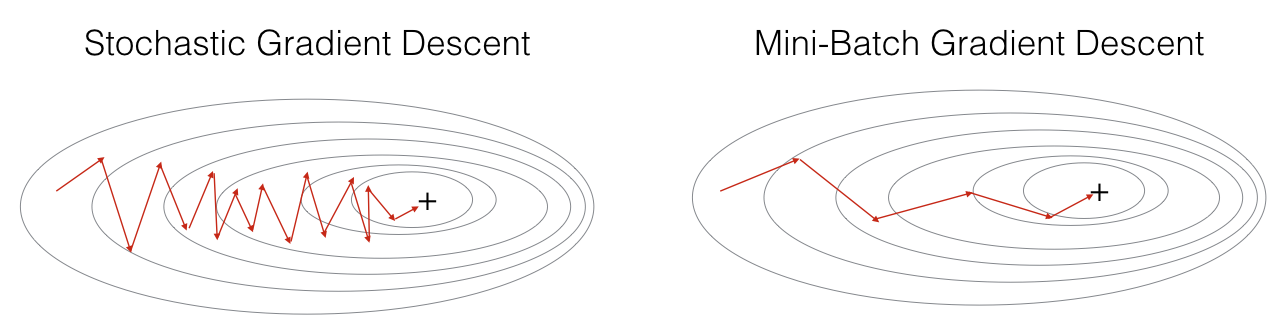
Stochastic Gradient Descent,即随机梯度下降法。这个其实相当于 MBGD 中 batch 为1的情况,即每次只迭代一个训练样本。虽然不是每次迭代得到的成本函数都向着全局最优方向,但是大的方向是逐渐趋向全局最优解的,最终的结果往往是在全局最优解附近,并在周围徘徊
Mini-batch Gradient Descent,即小批量批梯度下降法。这个算法有一个超参数 batch。将训练样本分成许多小份,每份的大小就是 batch。每次正向和反向传播时,就对这些样本进行迭代。每对所有训练样本完成一次迭代,则称为一个 Epoch。MBGD 大幅降低了每次迭代的时间。虽然每次迭代的样本并不是全部样本,数据存在噪声,所以成本函数的下降曲线会有些波动,但总体趋势依然是下降的
Momentum Gradient Descent
在大多数情况下,成本函数的图像不是那么规则,梯度下降可能会走很多“弯路”。如果使用 MBGD 或 SGD ,那梯度下降的方向则会更加波动
指数加权平均
原理
当我们要计算一组数的平均值时,通常做法是将这些数求和并且除以个数,但如果数据量比较大且计算次数比较多的时候,这样的计算就占用较多资源。指数加权平均 本质是以指数式递减加权的移动平均。通过递推的形式,各数值的加权随时间而指数式递减,越近期的数据加权越重,但较旧的数据也给予一定的加权。通过调整超参数 $\beta$ 的值,可以调整对历史数据的权重
- $V_t$ : 当前指数加权平均值
- $\theta_t$ : 当前数据值
偏差修正
大家可能会发现,因为 $V_0$ 的值为0,这对最初的一些平均值产生比较大的影响,为了消除这个影响,我们对公式做一些修改
\[V_t^{corrected}=\frac{V_t}{1-\beta^t}=\frac{\beta V_{t-1}+(1-\beta)\theta_t}{1-\beta^t}\]随着 t 的增大,偏差修正项的值越来越接近 1 ,所以该偏差修正项对数据前期影响大,后期影响小
原理
动量梯度下降利用指数加权平均,综合了历史的梯度以平滑本次更新的梯度。每次更新的梯度将不是独立的情况,而是拥有一定权重的历史梯度。如下图所示,红色显示了历史的梯度下降的方向均值,蓝色表示原始梯度方向,红色箭头为合成的方向 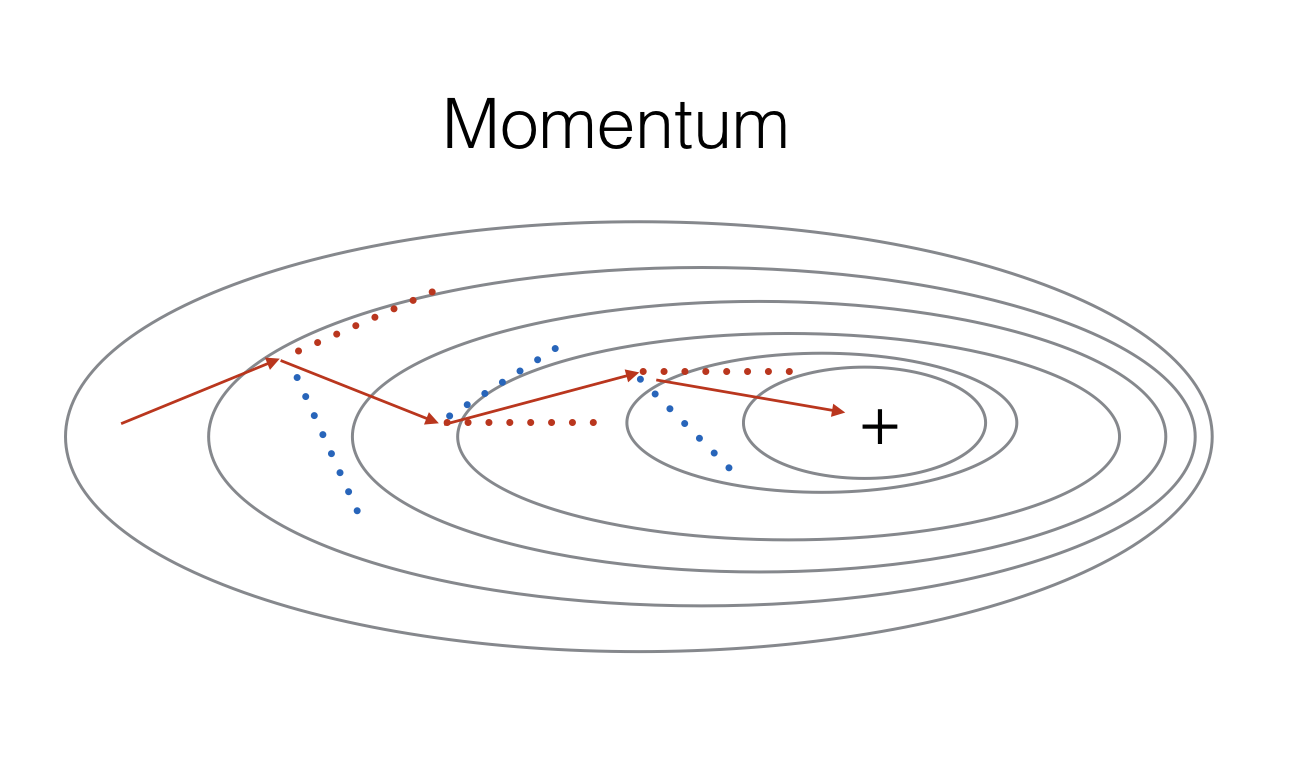
实现
相对梯度下降来说,在参数更新以及梯度计算时有所不同,为了简洁,将 $\frac{\partial{J}}{\partial{W^{[l]}}}$ 简写为 $dW^{[l]}$
\[\begin{equation} \begin{cases} V_{dW^{[l]}}=\beta V_{dW^{[l-1]}}+(1-\beta)dW^{[l]} \\ W^{[l]}:=W^{[l]}-\alpha V_{dW^{[l]}} \end{cases} \\ \begin{cases} V_{db^{[l]}}=\beta V_{db^{[l-1]}}+(1-\beta)db^{[l]} \\ b^{[l]}:=b^{[l]}-\alpha V_{db^{[l]}} \end{cases} \end{equation}\]一般来说 𝛽 从 0.8~0.999 范围内取值。建议取 0.9
RMSprop
原理
通过全局学习率逐参数的除以经过超参数 $\beta$ 控制的历史梯度平方和的平方根,使得每个参数的学习率不同,梯度大的参数学习率会降低。这样就使得参数梯度的平缓方向,取得更大的进步,而陡峭的方向则会变得平缓,从而加快训练速度
实现
为了简洁,将 $\frac{\partial{J}}{\partial{W^{[l]}}}$ 简写为 $dW^{[l]}$
\[\begin{equation} \begin{cases} S_{dW^{[l]}}=\beta S_{dW^{[l-1]}}+(1-\beta)(dW^{[l]})^2 \\ W^{[l]}:=W^{[l]}-\frac{\alpha}{\sqrt{S_{dW^{[l]}}}+\epsilon}dW^{[l]} \end{cases} \\ \begin{cases} S_{db^{[l]}}=\beta S_{db^{[l-1]}}+(1-\beta)(db^{[l]})^2 \\ b^{[l]}:=b^{[l]}-\frac{\alpha}{\sqrt{S_{db^{[l]}}}+\epsilon}db^{[l]} \end{cases} \end{equation}\]$\epsilon$ 为一个很小的值,为了防止出现分母为 0 的情况,一般取值为 $10^{-8}$ 。$\beta$ 一般取 0.999
Adam
Adaptive Moment Estimation,自适应矩估计综合了 Momentum Gradient Descent 与 RMSprop,与两者结合体类似,这里直接给出公式,为了简洁,将 $\frac{\partial{J}}{\partial{W^{[l]}}}$ 简写为 $dW^{[l]}$
\[\begin{equation} \begin{cases} V_{dW^{[l]}}=\beta_1 V_{dW^{[l-1]}}+(1-\beta_1)dW^{[l]} \\ V_{dW^{[l]}}^{corrected}=\frac{V_{dW^{[l]}}}{1-(\beta_1)^t} \\ S_{dW^{[l]}}=\beta_2 S_{dW^{[l-1]}}+(1-\beta_2)(dW^{[l]})^2 \\ S_{dW^{[l]}}^{corrected}=\frac{S_{dW^{[l]}}}{1-(\beta_2)^t} \\ W^{[l]}:=W^{[l]}-\frac{\alpha}{\sqrt{S^{corrected}_{dW^{[l]}}}+\epsilon} \end{cases} \\ \begin{cases} V_{db^{[l]}}=\beta_1 V_{db^{[l-1]}}+(1-\beta_1)db^{[l]} \\ V_{db^{[l]}}^{corrected}=\frac{V_{db^{[l]}}}{1-(\beta_1)^t} \\ S_{db^{[l]}}=\beta_2 S_{db^{[l-1]}}+(1-\beta_2)(db^{[l]})^2 \\ S_{db^{[l]}}^{corrected}=\frac{S_{db^{[l]}}}{1-(\beta_2)^t} \\ b^{[l]}:=b^{[l]}-\frac{\alpha}{\sqrt{S^{corrected}_{db^{[l]}}}+\epsilon} \end{cases} \end{equation}\]总结
各种优化算法对比
文档信息
- 本文作者:wzx
- 本文链接:https://masterwangzx.com/2018/12/21/Gradient-descent-optimization/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)